焊接轨迹设定:首先要判断机械臂可达性,根据工件结构确认机械臂能否准确到达焊接位置,还要满足特定角度要求。然后在直角坐标系下操作机械臂,通过X、Y、Z轴来定义引弧点、焊枪的倾斜角度及熄弧点的位置。最后进行重复运动设定,确保焊接路径的一致性。
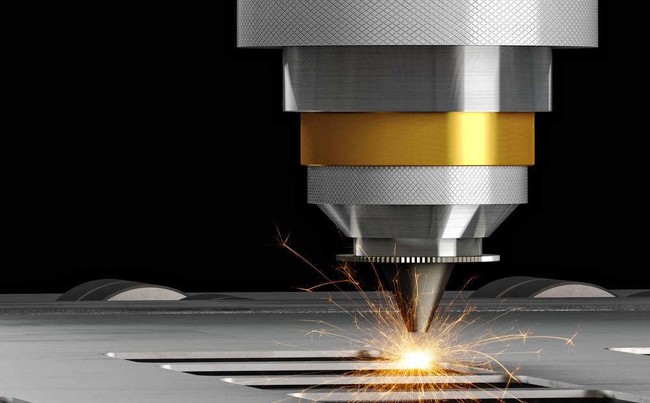
正运动技术创新方案:针对传统激光飞行焊接的局限性,正运动技术推出了机械臂-激光振镜协同飞行焊接方案。这个方案超级厉害!机械臂凭借多自由度特性完美解决复杂工件多角度焊接难题,振镜则通过高速扫描,精准控制激光焦点,实现毫秒级焊接响应。在协同工作时,机械臂负责工件的定位与移动,振镜快速调整激光路径,实现"边移动边焊接"的飞行动态焊接模式,效率提升不是一点点!
工业机器人焊接优势:焊接机器人重复精度可达±0.1mm,定位精度±1.0mm,远超人工焊接水平。激光焊接机器人通过聚焦光斑实现深熔透焊接,热影响区小,变形率降低80%以上。六轴机械臂搭配线性轴扩展(7自由度),可覆盖大型结构焊接需求,还支持多任务编程,如自适应多层焊接,通过传感器实时调整路径,超级智能!
成功案例分享:迁移科技联手集成商伙伴,针对高反光法兰盘工件特性,提出了"激光相机+视觉软件+机械臂及夹具"的解决方案。整个流程超级顺畅:整垛法兰盘运送至相机视野范围内,激光相机拍照采集点云数据,视觉软件识别工件位姿信息,智能规划最优抓取点,效率直接提升1.8倍,太牛了!
衣物定位花制作工艺:热升华转印技术先将图案印在转印纸上,再通过高温高压让染料气化渗透到织物纤维中,适合丰富色彩和细腻图案。定制网版印刷通过定制化网版在特定位置施加颜料,确保图案精准呈现,适合大批量生产。还有激光定位结合机械臂技术,实现更精准的图案定位。
说实话,刚开始接触可能会觉得有点复杂,但一旦掌握了基本步骤,其实并不难!主要就是焊接轨迹设定那几个关键点:判断机械臂可达性、设定关键点位、重复运动设定。现在很多系统都有图形化界面,操作起来更加直观。建议先从简单的直角坐标系操作学起,慢慢熟悉X、Y、Z轴的定位方法,多练习几次就能上手了!
哇!这个方案真的超级酷!它把机械臂和振镜的优势完美结合起来了。机械臂负责大范围的移动和定位,振镜负责超精细的激光控制,俩配合得天衣无缝。最厉害的是实现了"边移动边焊接"的模式,效率提升不是一星半点。而且针对复杂工件的多角度焊接问题,这个方案解决得特别到位,真的是行业内的一个重大突破!
清理焊渣其实有个很聪明的办法:先把激光切割机的切割机头拆下来,换上专门去渣装置。然后调整钻头到合适的状态和阵列,让机械臂带动去渣装置移动,使支撑板被夹在钻头之间。接着机械臂沿着支撑板长度方向运动,同时驱动钻头旋转,这样就能把焊渣清理得干干净净。整个过程自动化程度很高,省时省力!
工业焊接机器人的精度简直让人惊叹!重复精度能达到±0.1mm,定位精度±1.0mm,这比人工焊接精准太多了。激光焊接通过聚焦光斑实现深熔透焊接,热影响区特别小,变形率能降低80%以上。六轴机械臂加上线性轴扩展,能达到7个自由度,覆盖各种大型结构焊接需求,还能实时调整路径,智能得不得了!










添加评论